LEGO MINDSTORMS NXT

LEGO MINDSTORMS EV3

Visual Programming
NXT-G
LEGO®
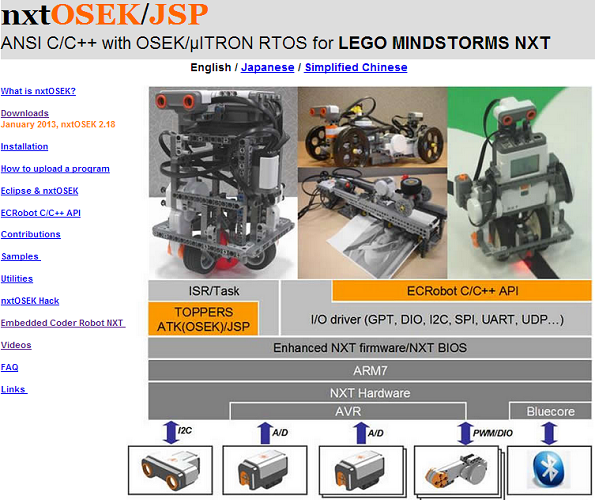
Open Software

Open Hardware

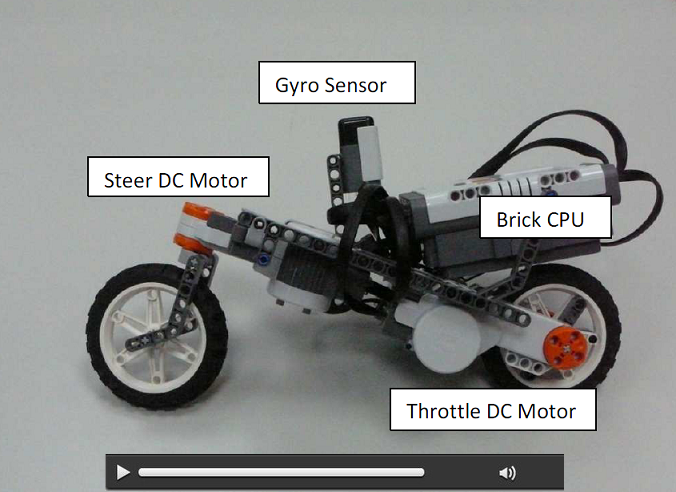
Bicycle
Razyeh Mousavi
Ballbot
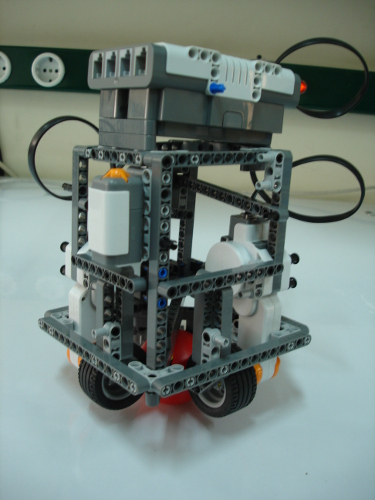
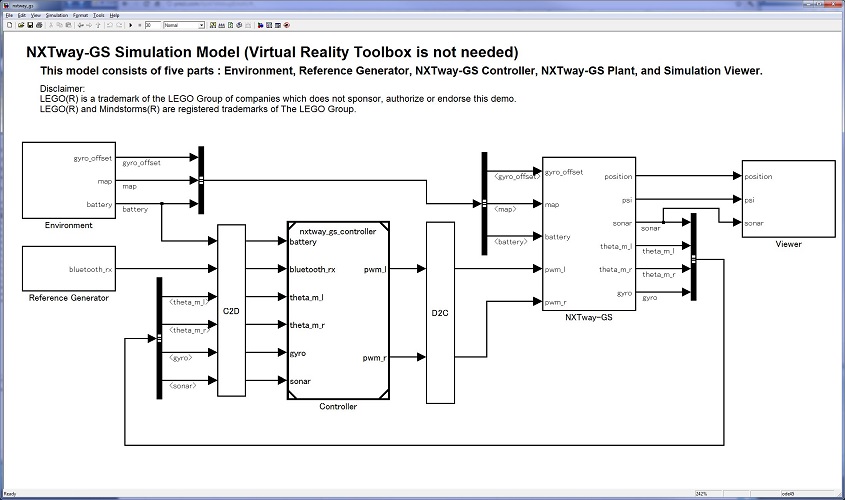
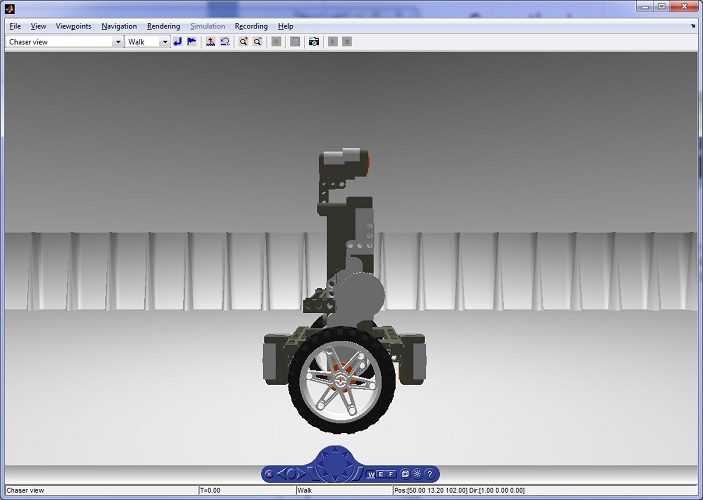
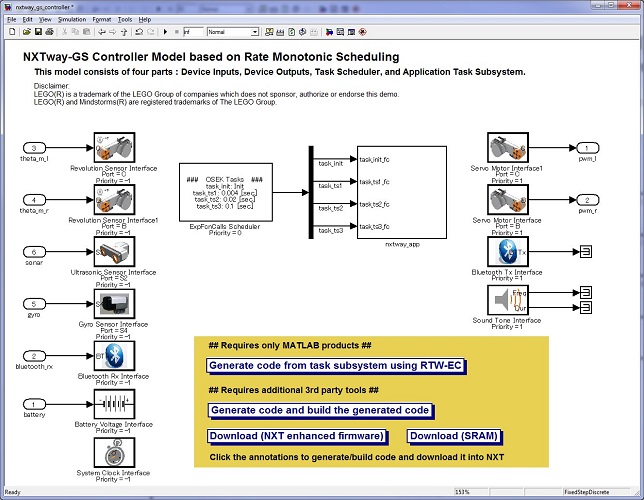
NXTway

Ball on Plate

Electronics Stability Control

Operating System
Virtual Robot
3D Animation
Controller Design
Virtual LEGO Set
We made one!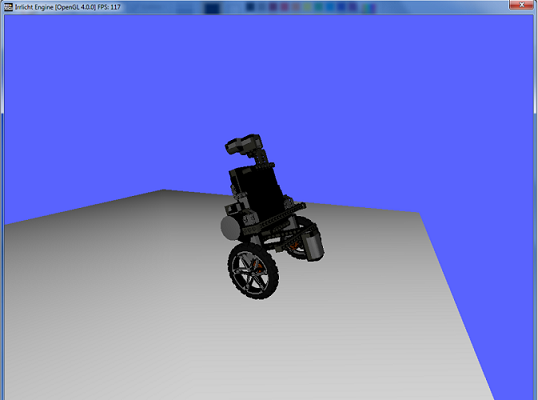
Alborz Gharraee
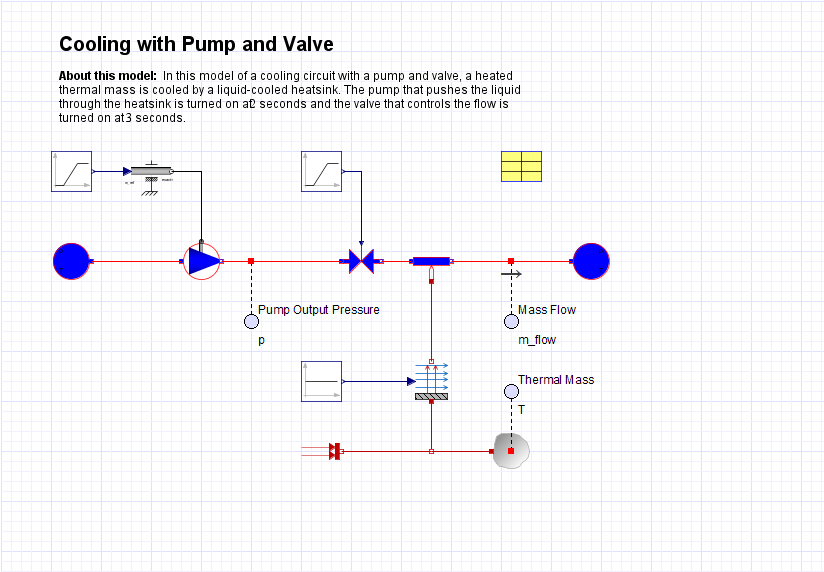
Modelica and MapleSim
- The connections between components are physical connections like position, voltage, flow,...
- Acausal modeling is very similar to building a real system
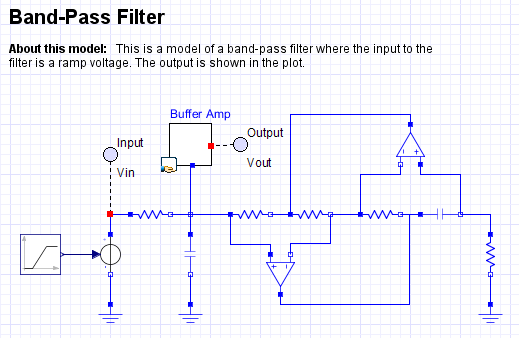
Electrical Systems
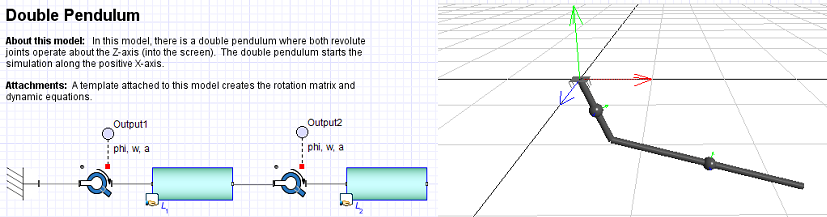
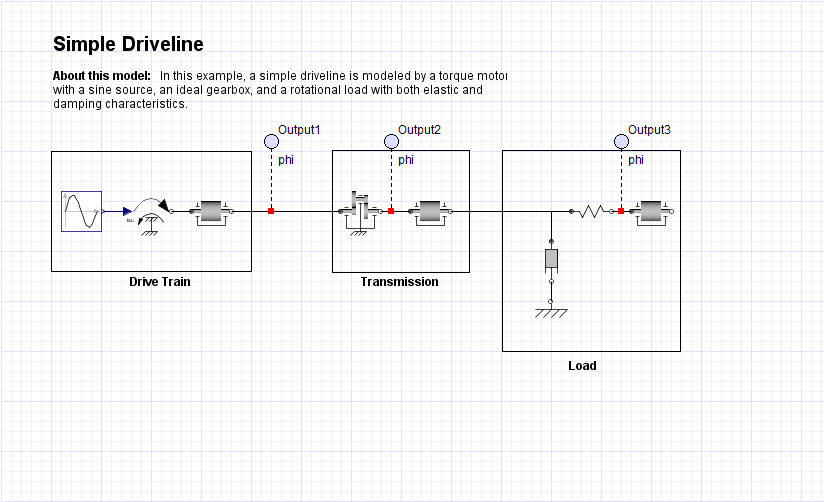
Mechanical Systems
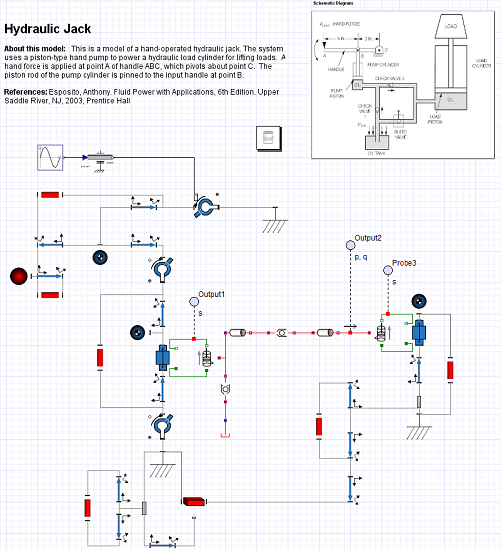
Hydraulic Systems
Thermal Systems
Chemical Systems
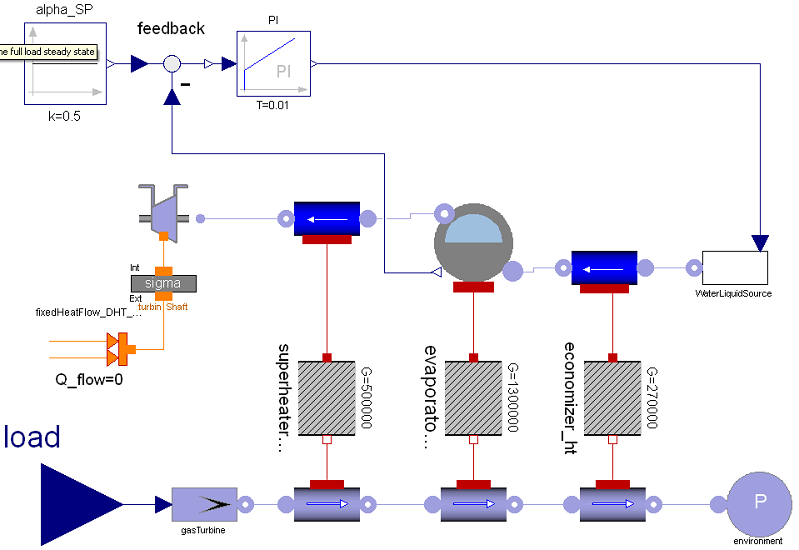
Acausal Modeling with MapleSim
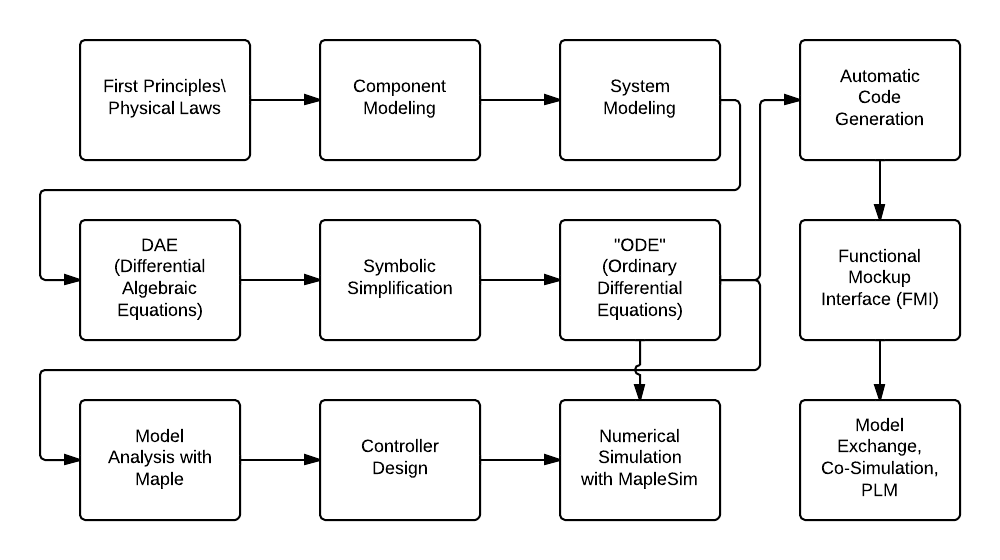
Functional Mockup Interface

- Model Exchange, Co-Simulation, Product Lifecycle Management
- There are over 35 Tools supporting FMI
Courtesy of ITAE
The V Diagram
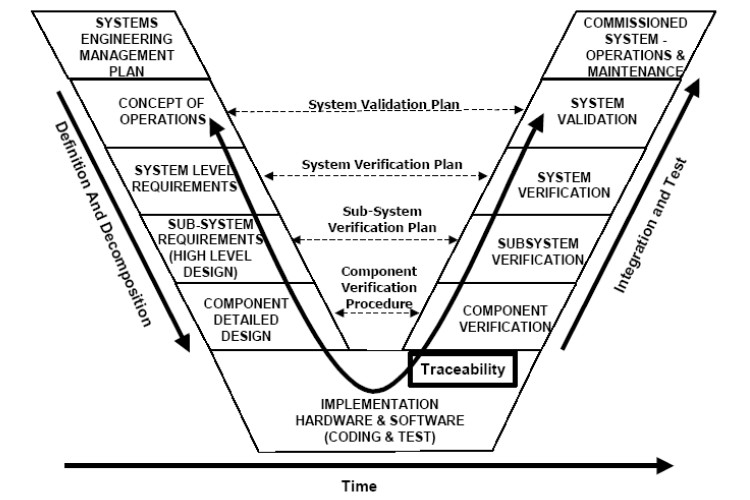
from engineering.com
Trial and Error
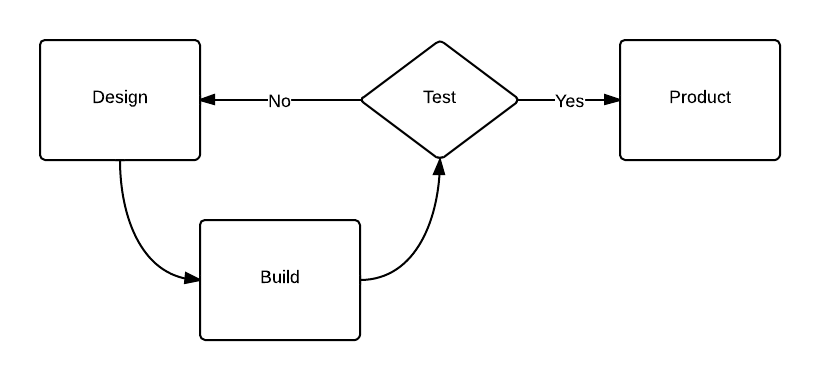
Expensive, time consuming, not reliable
Model Based Approach
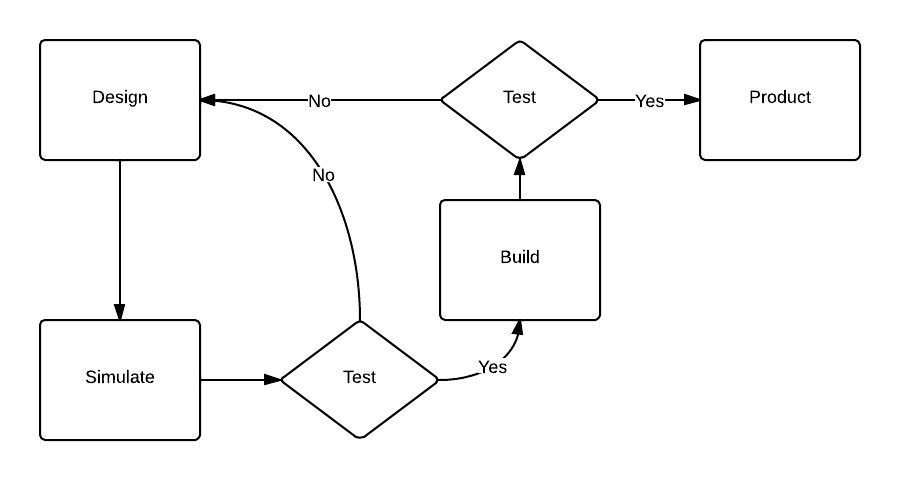
Model Based Development

Saves resources, time, money
Courtesy of ITAE
Modern Approach
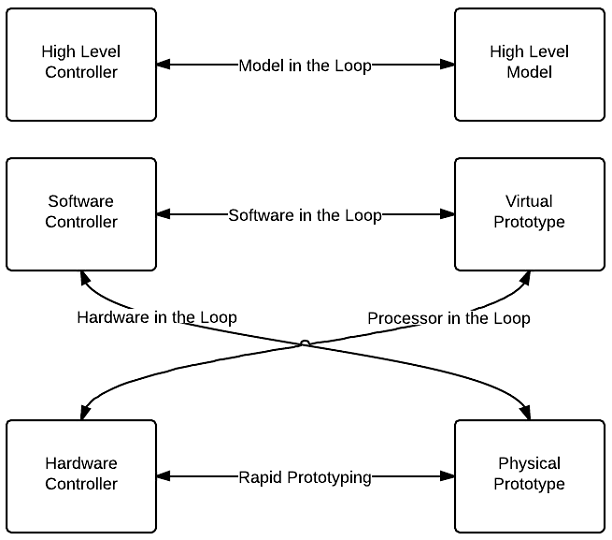
Software in the Loop
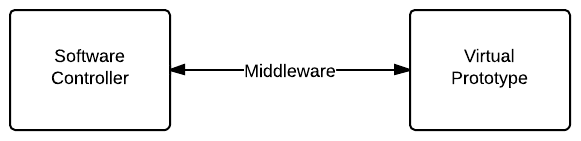
- The controller and the virtual prototype are two different applications.
- The applications "talk" to each other using a "middleware".
- The controller doesn't see the difference between the virtual and physical prototypes.
- Software engineers do not have to wait for the hardware!
PR2 by Willow Garage

TurtleBot

Husky

Clearpath Robotics, Waterloo, Ontario
Baxter

ROS Industrial and MoveIt

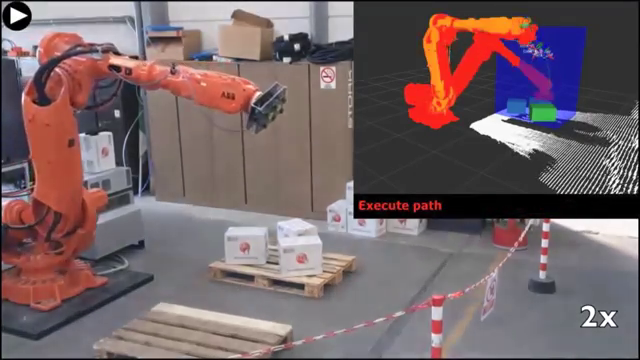
NXT ROS

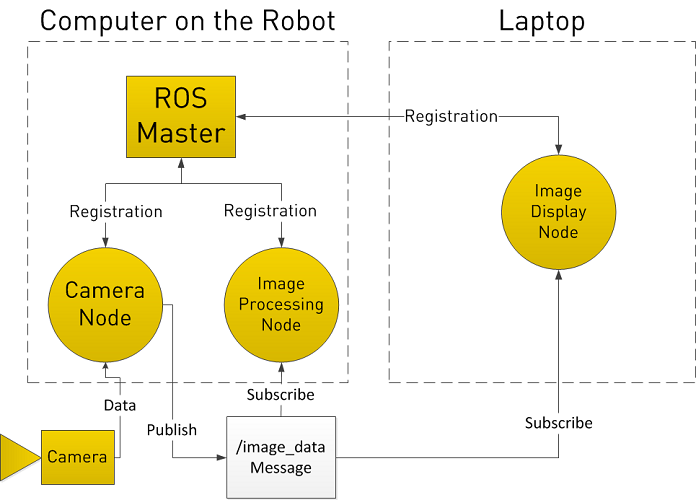
ROS 101
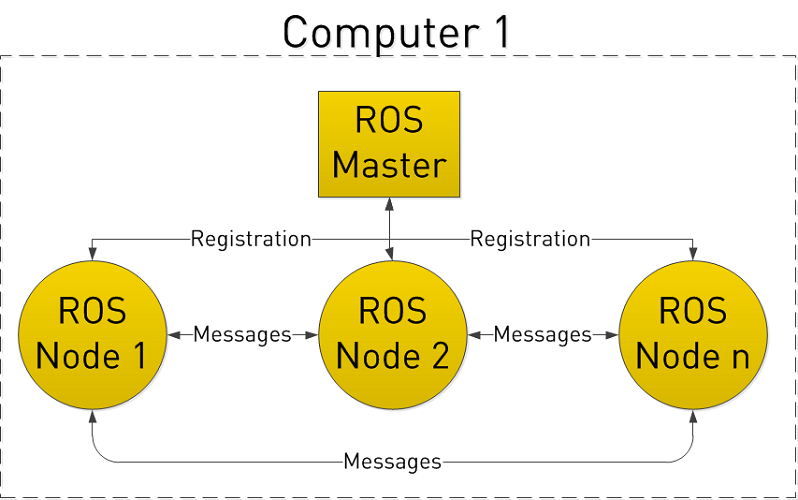
ROS 101
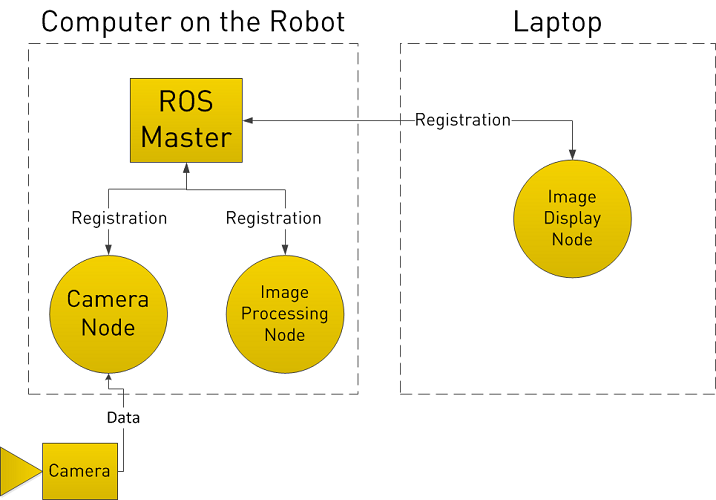
ROS 101
Camera

OpenCV
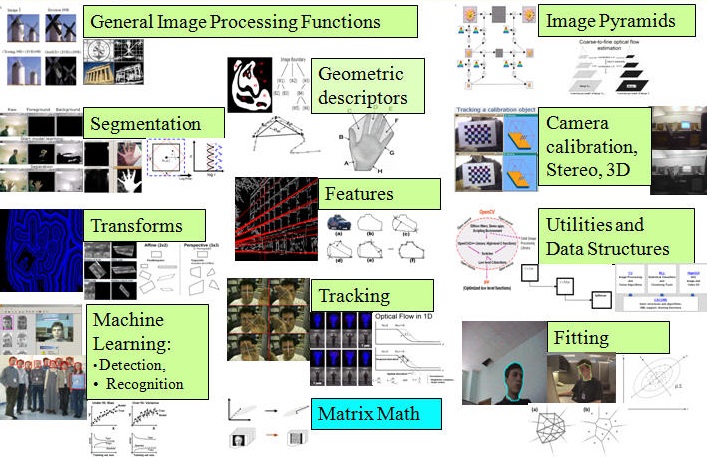
OpenCV
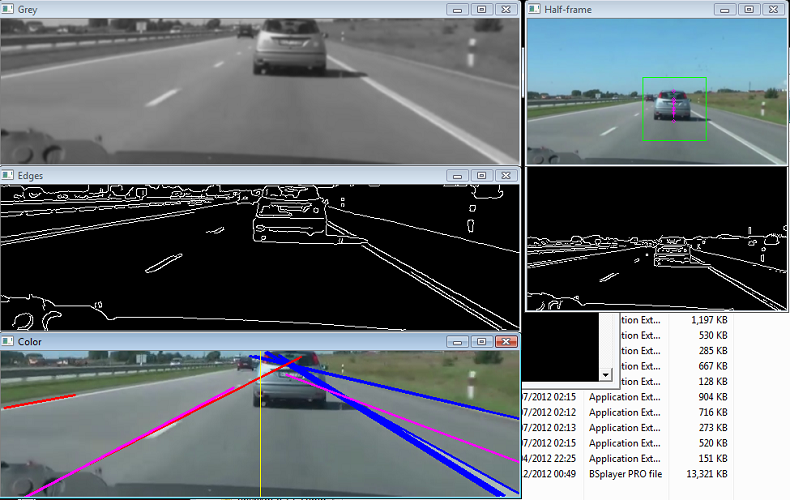
motion, line, face, feature detection
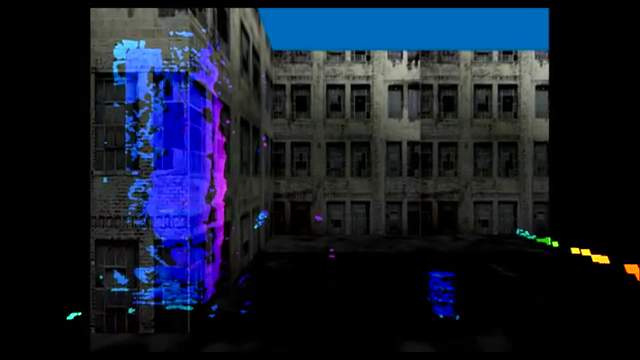
Depth Estimation with OpenCV
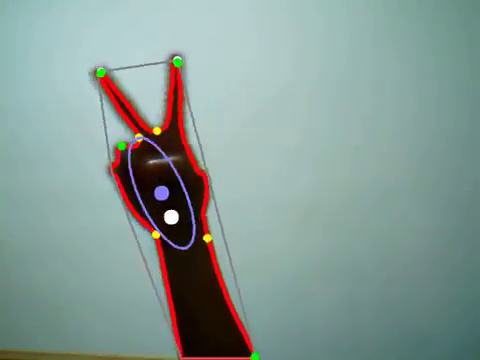
Gesture Detection with OpenCV
CloudSim
